|
ĪĪĪĪ╬„┐╦æ¬ė├
ĪĪĪĪĖ┼╩÷
ĪĪĪĪ▒ŠŲ┌ąĪ╬„×ķ┤¾╝ęĦüĒČÓįŲ┼_3DÆ▀├Ķ┼c³cįŲöĄō■╚┌║Žį┌╗▄ćūįäė│ķśėŽĄĮyĄ─æ¬ė├ĮķĮBĪŻ
ĪĪĪĪ╬„┐╦Ą─╝ż╣Ō└ū▀_ęį╝░3DįŲ┼_Ż¼ė╔ė┌Š▀ėą▀hŠÓļx┤¾ł÷Š░£y┴┐ęį╝░┴╝║├Ą─╩ę═ŌŁhŠ│▀mė├ąį┼c┐╣Ė╔ö_ąį─▄Ż¼į┌õōĶFĪó╗»╣żĪóę▒ĮĪó╬’┴„Ą╚ČÓéĆąąśIČ╝Ą├ĄĮÅVĘ║Ą─æ¬ė├ĪŻ
ĪĪ
ĪĪĪĪæ¬ė├ł÷Š░
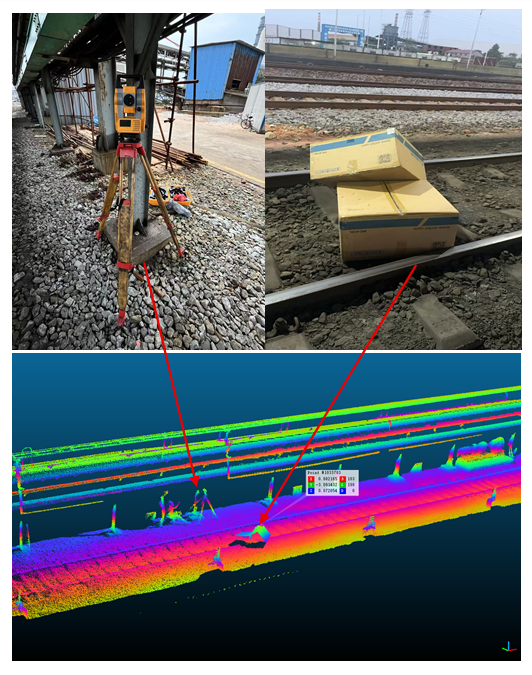
ĪĪĪĪ╗▄ćūįäė│ķśėŽĄĮyæ¬ė├:į┌Ēö▓┐ėąĒö┼’Ė▓╔wķL400mĄ─ĶF▄ēģ^ė“Ż¼═Ż┐┐Ą─╗▄ćė╔ČÓ╣Ø▌dėą┤²▓╔śėĄV┴ŽĄ─▄ćĹĮM│╔Ż¼ąĶę¬▓╔ė├ūįäė╗»Ė─įņüĒ┤·╠µ╚╦╣ż▓╔śėŻ¼ūįäėČ©╬╗├┐╣Ø▄ćĹā╚┐╔░▓╚½▀Mąą▓╔śėĄ─ģ^ė“▓ó╠ß╣®▓╔śėū°ś╦╝»║ŽĮo│ķśė┐žųŲŽĄĮyŻ¼ęį▒Ń┼┼│²╚╦×ķĖ╔ö_Ż¼╣Ø╝s╚╦┴”▓ó╠ß╔²ū„śIą¦┬╩ĪŻ
ĪĪĪĪå╬éĆįŲ┼_¤oĘ©Ė▓╔w╚ń┤╦¬MķLĄ─┤¾ĘČć·Ą─ģ^ė“Ż¼Ė∙ō■£y╦Ń╩╣ė├9éĆįŲ┼_▀Mąą3DÆ▀├ĶŻ¼╚╗║¾ī”├┐éĆįŲ┼_Ą─³cįŲöĄō■▀Mąą╚┌║ŽŻ¼ūŅ║¾ī”╗▄ć╦∙ėą▄ćĹöĄō■▀Mąą╚źįļŻ¼ĘųĖŅęį╝░Č©╬╗╠Ä└ĒĪŻ
ĪĪĪĪ╩▄Ž▐ė┌å╬┼_ļŖ─XĄ─╠Ä└Ē─▄┴”Ż¼ČÓįŲ┼_Ą─Æ▀├ĶŽĄĮy═∙═∙ąĶę¬╩╣ė├ČÓ┼_ļŖ─XĘųäeī”▓┐ĘųįŲ┼_▀Mąą┐žųŲŻ¼ę“┤╦═∙═∙ąĶę¬▓╔ė├Ęų▓╝╩ĮĄ─═©ėŹ(▓╔ė├ų„šŠ+3éĆÅ─šŠŠWĮj╝▄śŗ)Ż¼╝┤Å─šŠĖ„┼_ļŖ─XĘųäe▓╔╝»▓┐ĘųįŲ┼_Ą─öĄō■▀Mąą▓╔╝»Ż¼ūŅĮKģR┐éĄĮų„šŠėŗ╦ŃĪŻ
ĪĪĪĪė╔┤╦Ż¼ų„šŠĄ─ėŗ╦ŃöĄō■┴┐äĪį÷Ż¼×ķ┴╦ØMūŃ╔·«aū„śIĄ─īŹĢrąįŻ¼═∙═∙ąĶ▀Mąąėŗ╦Ń╝ė╦┘ĪŻ

ĪĪĪĪ╔ŽłDĘųäe×ķ╚╦╣ż▓╔śėęį╝░Ė─įņ║¾Ą─▓╔śėÖCŲ„╚╦ūįäė▓╔śė
ĪĪĪĪČÓéĆįŲ┼_ŽĄĮyś╦Č©┼c³cįŲ╚┌║Ž
ĪĪĪĪSICK ×ķ┴╦īŹ¼F┤¾ĘČć·Æ▀├ĶŻ¼ąĶę¬ī”├┐éĆįŲ┼_Æ▀├ĶĄ─³cįŲöĄō■▀MąąŲ┤Įė┼cöĄō■╚┌║ŽŻ¼▓óūŅĮKš¹║Ž│╔ę╗éĆĮyę╗ū°ś╦ŽĄĄ─╗▄ć▄ćĹ─Żą═ĪŻ
ĪĪĪĪś╦Č©ĘĮ░Ė╩╣ė├▓╗═¼Ą─įŲ┼_Æ▀├Ķś╦Č©ŽõŻ¼╚╗║¾į┘═©▀^Ė▀Š½Č╚£y└LįOéõüĒ£y└Lś╦Č©Žõ╔ŽĮŪ³cŻ¼╗∙ė┌ČÓĮMī”æ¬öĄō■ėŗ╦Ń│÷«öŪ░įŲ┼_Æ▀├Ķū°ś╦ŽĄ┼c╚½Šų£y└Lū°ś╦ŽĄĄ─▐DōQĻPŽĄŻ¼ęį┤╦ŅÉ═ŲŻ¼Å─Č°īŹ¼FīóČÓéĆįŲ┼_Æ▀├Ķū°ś╦ŽĄČ╝Įyę╗ĄĮ£y└L╚½Šųū°ś╦ŽĄĪŻ╚ńŽ┬łD╦∙╩ŠĪŻ
ĪĪĪĪūŅĮKÆ▀├ĶŲ┤Įėą¦╣¹╚ńŽ┬łD╦∙╩Š
ĪĪĪĪĘų▓╝╩Į═©ėŹ
ĪĪĪĪ╗∙ė┌OPC_UAĄ─═©ėŹĘĮ╩ĮŻ¼▓╗āHīŹ¼F┴╦ŽĄĮyųąČÓéĆÅ─šŠļŖ─X┼cų„šŠŽĄĮyĄ─Ęų▓╝╩Į═©ėŹŻ¼Č°ŪęīŹ¼F┴╦įŲ┼_Æ▀├ĶŽĄĮy┼c╔Ž╬╗ÖCc#▄ø╝■Ą─═©ėŹŻ¼ŽÓ▒╚ė┌é„ĮyĄ─TCP/IP═©ėŹĘĮ╩ĮŻ¼é„▌öĖ³╝ėĘĆČ©░▓╚½Ż¼Ūę▒Ńė┌▓╗═¼ŠÄ│╠šZčį╦∙īæ▄ø╝■Ą─═©ėŹĪŻ
ĪĪ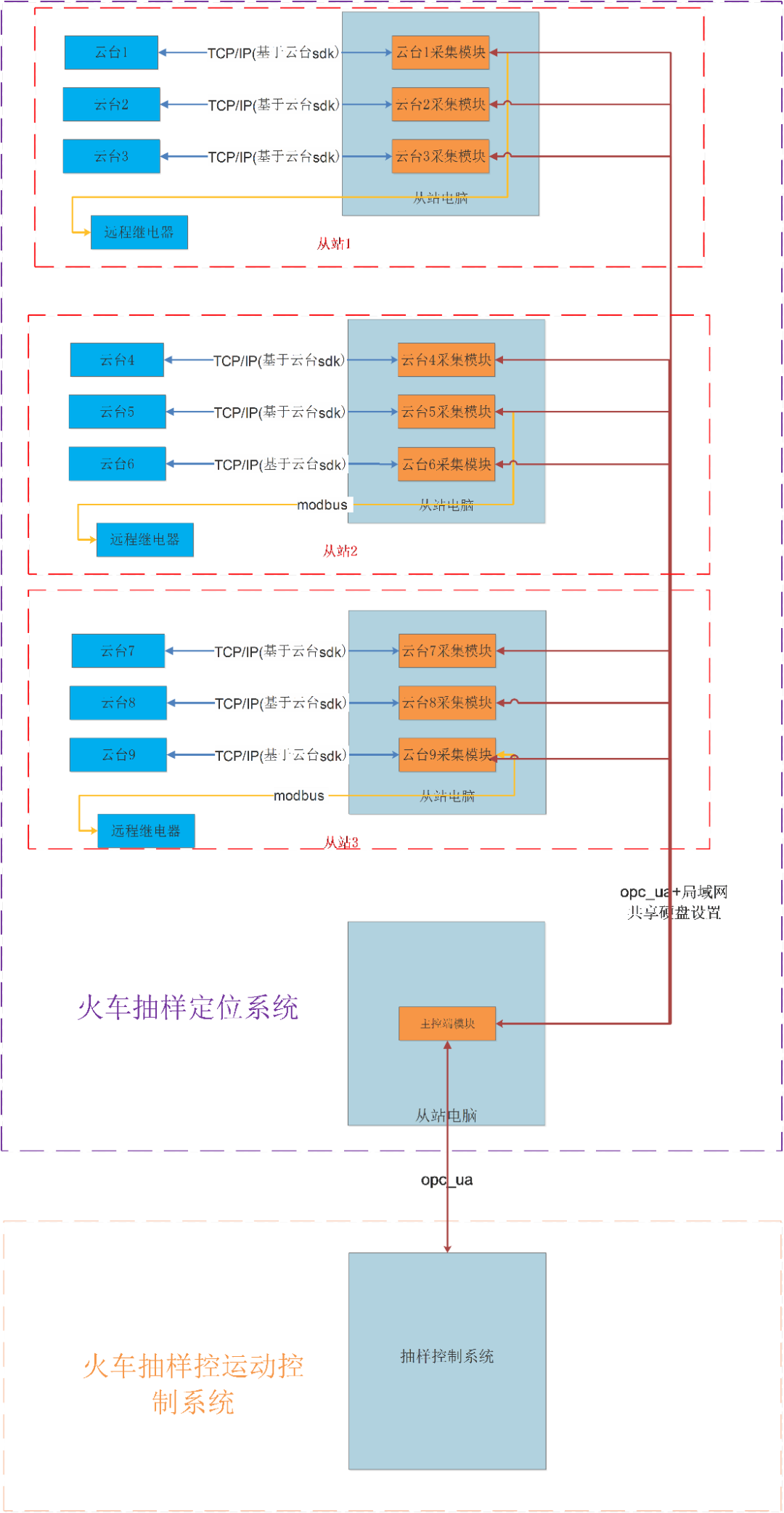
ĪĪĪĪ▓óąąėŗ╦Ń╝ė╦┘
ĪĪĪĪå╬įŲ┼_Ą─å╬┤╬▓╔╝»Ą─³cįŲéĆöĄ×ķ230╚f³cū¾ėęŻ¼ę“┤╦9éĆįŲ┼_Ą─▓╔╝»³cįŲöĄō■ĄĮ▀_2000╚f³cū¾ėęŻ¼400├ūÆ▀├ĶĘČć·ęįā╚Ą─Č©╬╗▄ćĹČÓ▀_29╣ØŻ¼×ķ£p╔┘öĄō■╠Ä└ĒĢrķgŻ¼ŽĄĮy▓╔ė├╗∙ė┌OpenMP▓óąąėŗ╦Ń╝ė╦┘ĪŻŽÓ▒╚ė┌Ųš═©Ą─ČÓŠĆ│╠╝ė╦┘Ż¼OpenMP▓óąąėŗ╦Ń╝ė╦┘Ė³▀mė├ė┌╦ŃĘ©ųąČÓéĆŽÓ═¼Ą─ī”Ž¾ąĶę¬▓óąąėŗ╦ŃĄ─ŪķørŻ¼ØMūŃ┴╦ė├æ¶ī”¼Fł÷▓╔ė├ū„śI╣Ø┼─Ą─ę¬Ū¾ĪŻ
ĪĪ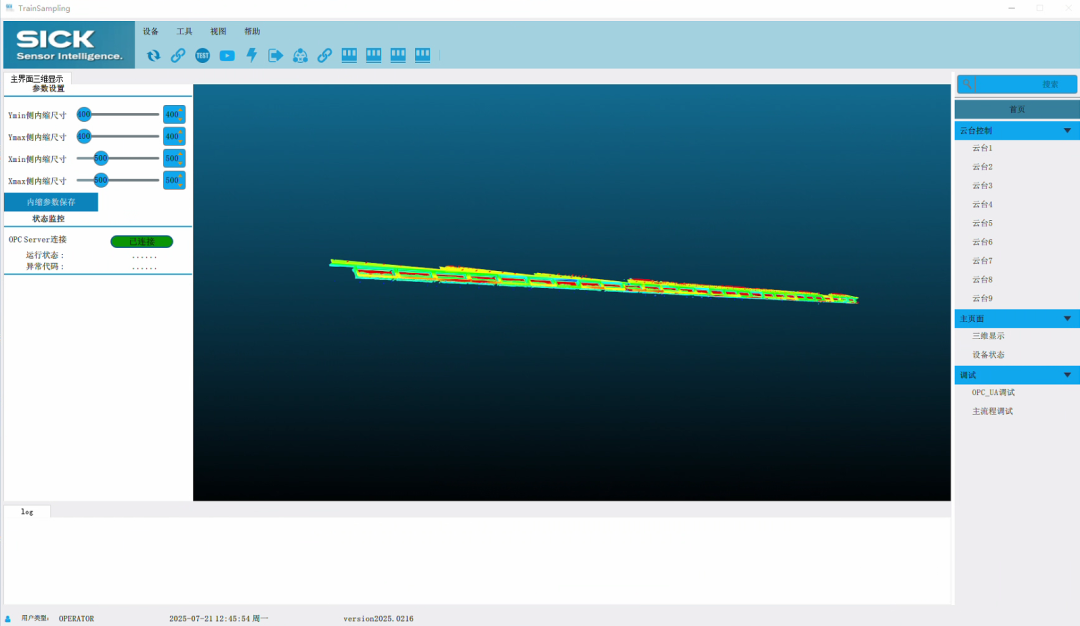
ĪĪĪĪŽĄĮyā×ä▌
ĪĪĪĪ•ČÓéĆįŲ┼_ś╦Č©┼cöĄō■╚┌║Ž
ĪĪĪĪĖ▓╔wĘČć·Ė³┤¾Ż¼┐╔ØMūŃ┤¾ł÷Š░Ė▀Š½Č╚Ą─Č©╬╗ąĶŪ¾ĪŻ
ĪĪĪĪ•Ęų▓╝╩Į═©ėŹ
ĪĪĪĪ┐╔Ė∙ō■┐═涼Fł÷Ą─Ūķør║Ž└ĒĘų┼õČÓ┼_ėŗ╦ŃÖC┘Yį┤Ż¼ęįīŹ¼FöĄō■═©ėŹ┼c▓╔╝»ęį╝░ėŗ╦Ńą¦┬╩Ą─ūŅ┤¾╗»ĪŻ
ĪĪĪĪ•▓óąąėŗ╦Ń╝ė╦┘
ĪĪĪĪ▀mė├▓óąąėŗ╦Ń╝ė╦┘Ą─ĘĮĘ©Ż¼╠Ä└Ē║Ż┴┐Ą─³cįŲöĄō■Ż¼£p╔┘┴╦ėŗ╦ŃĢrķgŻ¼▒ŻūC┴╦öĄō■Ą─Ę┤üĄ─╝░ĢrąįĪŻ
ĪĪĪĪĄõą═æ¬ė├░Ė└²
ĪĪĪĪČÓéĆįŲ┼_Č©³c░▓čb▀MąąÆ▀├ĶŻ¼╗“ČÓéĆ└ū▀_╗“įŲ┼_┼õ║Žū„śIÖCąĄ▀\äėŻ¼╚╗║¾▀Mąą┤¾ł÷Š░Ą─3DÆ▀├Ķ╝░ŽÓĻPæ¬ė├Ż¼╠žäeį┌┴Žł÷ūįäėČč╚Ī┴Ž┼c▒PÄņŽĄĮyŠ▀ėąÅVĘ║æ¬ė├Ż║
ĪĪĪĪ1. Ēö┼’Äņģ^╬’┴ŽČ©³c▒PÄņŽĄĮy(═©│Ż¤o▀\äėÖCąĄŻ¼įŲ┼_Č©³c░▓čbį┌Ēö┼’╔Ž)Ż║
ĪĪĪĪ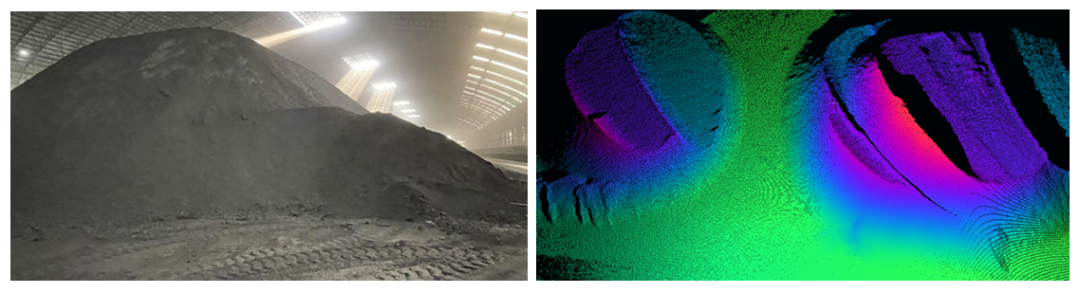
ĪĪĪĪ2. ╗∙ė┌ČÓ└ū▀_┼cČÓąą▄ć┴Žł÷Čč╚Ī┴Ž┼c▒PÄņŽĄĮy
ĪĪĪĪ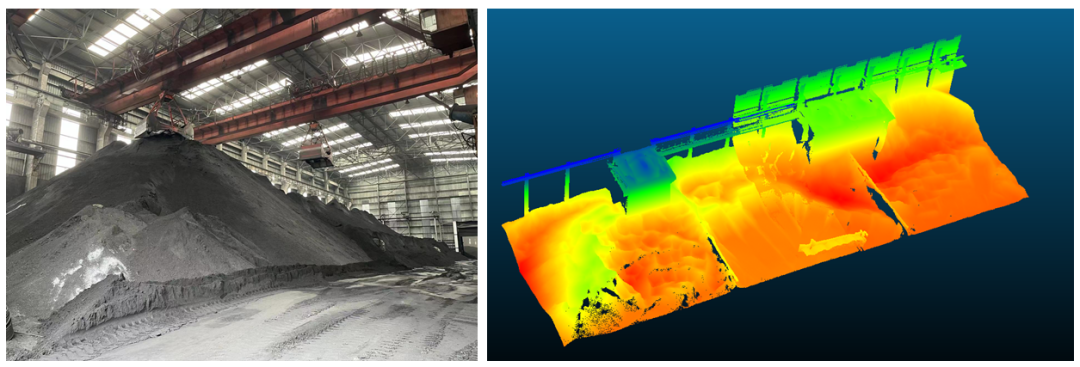
ĪĪĪĪ3. ╗∙ė┌ČĘ▌åÖCĄ─┴Žł÷Čč╚Ī┴Ž┼c▒PÄņŽĄĮy
ĪĪĪĪ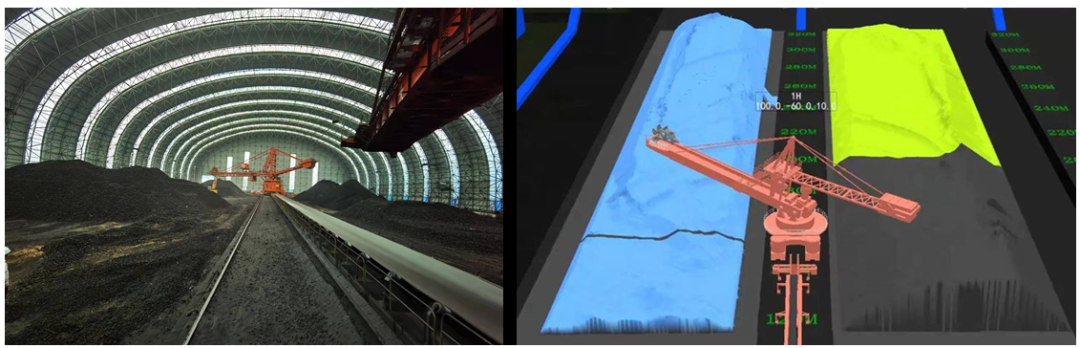
ĪĪĪĪ┐éĮY
ĪĪĪĪSICKČÓįŲ┼_Æ▀├Ķ┼c³cįŲöĄō■╚┌║ŽŽĄĮyŻ¼æ{ĮĶŲõ║åęūś╦Č©ĪóĘų▓╝╩Į═©ėŹĄ─ņ`╗Ņąį╝░Ė▀ą¦ėŗ╦Ń─▄┴”Ż¼▀mė├ė┌┤¾ĘČć·Ė▀Š½Č╚Æ▀├Ķ┼cČ©╬╗ł÷Š░Ż¼×ķė├æ¶Ą─╣ż╦ć┴„│╠ūįäė╗»╠ß╣®┐╔┐┐▒ŻšŽĪŻ

|

